Двигатели постоянного и переменного тока
Содержание
Электромеханическое устройство, которое за счет преобразования электрической энергии приводит в движение механизмы, подключенные к нему, называется электродвигателем. В зависимости от вида потребляемой энергии они подразделяются на машины постоянного и переменного тока.

Их преимущества все более вытесняют двигатели на других источниках энергии из большинства конструкций производственных и бытовых механизмов. В автомобилях массовая замена ДВС на электропривод начинается на наших глазах.
Постоянный ток
Электрический ток (направленное движение заряженных частиц), не изменяющийся по направлению и амплитуде, называется постоянным. Источники его изначально были химические процессы, а сейчас возобновляемые (солнце, ветер). Преобразование его технически сложно, поэтому на большие расстояния передавать такой ток довольно дорого.
На малых расстояниях у него есть преимущества: отсутствие реактивной мощности и малые потери в проводах за счет прохождения по всему сечению проводника. Двигатели постоянного тока устанавливаются рядом с источниками и преобразователями, чтобы иметь возможность менять величину и направления тока в соответствии с потребностями в моменте и скорости исполнительного механизма.
Принцип действия
Школьный опыт с демонстрацией вращения рамки в магнитном поле отрытый в 1821 Фарадеем поясняет работу двигателя постоянного тока. Металлическая рамка с проходящим через нее током от батареи повернется под действием магнитного поля так, чтобы его воздействие стало нулевым. Для получения непрерывного вращения необходимо в этот момент поменять направление тока, либо объединить несколько рамок в процессе.

Виды двигателей постоянного тока
К концу 19 века уже началась эксплуатация электрических машин постоянного тока: генераторов и моторов. Причем оба вида не отличаются конструктивно и могли применяться как для выработки электроэнергии, так и для производства работ.
Коллекторный мотор
Принцип вращения рамки с током в поле постоянного магнита наиболее ярко реализован в коллекторных электродвигателях. Такие электродвигатели работают как от постоянного, так и от переменного тока. Впервые судно с двигателем постоянного тока запустил Б.С. Якоби по реке Неве в 1838г.
Такой двигатель состоит из неподвижной части (статор), на которой устанавливаются магниты для маломощных двигателей или катушки из ферримагнитных сталей, и обмотки с медным проводом для мощных электрических машин.
Якорь МПТ собран из пластин электротехнической стали, изолированных от вала и друг от друга для уменьшения вихревых токов. В пазы цилиндра укладывается витки провода из меди разного сечения в зависимости от токов и выбранной схемы (петлевая, волновая). Концы проводов выводятся и ввариваются (впаиваются) в ламели коллектора.
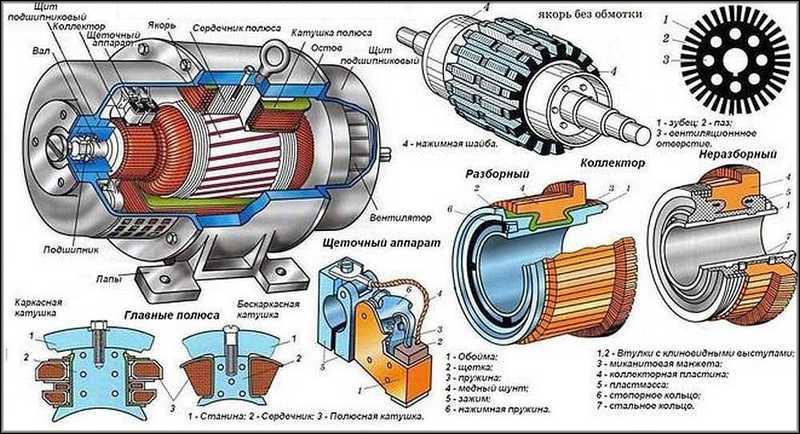
Коллектор состоит из медных изолированных пластин (ламелей) закрепленных по окружности, изолированных друг от друга и корпуса якоря. По ним перемещаются притертые подпружиненные щетки, закрепленные в щеткодержателе, для последовательной подачи тока в обмотки якоря. При подаче напряжения на щетки, якорь начинает вращаться и двигатель постоянного тока выходит в заданный режим.
Универсальный коллекторный мотор
Дальнейшее развитие коллекторных ДПТ позволило использовать их при работе от источников переменного тока. Для этого шихтуется не только якорь, но и цилиндр статора набирается из пластин электротехнической стали, а обмотки возбуждения соединяются последовательно с якорными. Одновременная смена полярности на них при прохождении переменного тока не меняет направление вращения вала двигателей.

Основное отличие — шихтованные статор и якорь делают магнитный поток стабильным и не создают вихревых токов (меньше греются). В остальном универсальный двигатель мало чем отличается от обычного коллекторного.
Вентильно-индукторные двигатели
Такие электромоторы иногда называются бесщёточными или безколлекторными. Суть такой конструкции в том, что ротор имеет зубчатое строение, собранное из постоянных магнитов, а обмотки возбуждения размещаются на зубчатых полюсах статора.

Переключением полюсов (катушек) занимается встроенный контроллер, за обратную связь, контролирующую положение якоря (ротора), отвечает датчик Холла. При включении пары катушек магнит на роторе движется к ней, затем следующая пара получает питание. Скорость вращения определяется частотой переключения катушек — чем выше частота, тем выше скорость.
Недостатком такой конструкции является пульсирующий крутящий момент. Плюсы: нет коллектора и щеток, простая конструкция, хорошее управление скоростью и малые габариты.
Безколлекторный с независимым возбуждением
Конструкция ротора этого двигателя собрана из двух зубчатых пакетов из магнитной стали на общей оси. Вершины зубцов пакета смещены друг относительно друга на 120°. Пакеты отстоят друг от друга на расстоянии, а зубцы одного совпадают с впадинами другого, таким образом, что суммарный магнитный поток ротора равен нулю.
Размещенная на статоре обмотка возбуждения тоже распределена со смещением в 120°. Собранный из электротехнической стали статор имеет размер такой, чтобы его магнитное поле перекрывало оба пакета магнитов ротора.

Поочередное включение катушек ротора создает магнитное поле в обоих магнитных блоках и ротор начинает плавно вращаться. Изменяя частоту и направление переключения секций обмотки возбуждения, а также силу тока в них, можно получить бесконтактный реверс, линейный крутящий момент и плавное изменение скорости.
Кроме этих достоинств есть еще отсутствие магнитов и графитовых щеток с коллектором. К недостаткам можно отнести сложность конструкции двигателей и питание обмоток от электронного преобразователя.
Несомненными достоинствами двигателей постоянного тока можно отнести:
- уровень плавного регулирования скорости достигает 10000 об/мин;
- легкость управления скоростью за счет напряжения, а крутящего момента — током якоря;
- за счет обратной связи можно поддерживать хороший момент на малых оборотах.
Их недостатков можно отметить обязательное наличие преобразователя переменного тока в постоянный и сложность конструкции некоторых видов двигателей (коллектор со щетками, сложный якорь).
Переменный ток
Основных недостатков переменного тока два: наличие потерь мощности за счет обменных процессов между индуктивностями и емкостями в сетях (реактивной мощности); вытеснение переменного тока в проводнике от центра к поверхности. Чем выше частота, тем меньше используется сечение провода.
Изменение напряжения решается легко при помощи трансформаторов, потери в котором составляют не более 1% передаваемой мощности. Трансформаторы решают легко две задачи: гальванической развязки цепей высокого и низкого напряжения; за счет высокого напряжения при передаче электроэнергии на большие расстояния снижаются потери в проводах.
Создание трехфазных сетей переменного тока, кроме повышения эффективности электроснабжения, привело к появлению двигателей переменного тока, так как они получили вращающееся магнитное поле напрямую из сети без преобразователей.
Виды двигателей переменного тока
Применение трехфазных электросетей привело к доминированию асинхронных двигателей переменного тока во всех отраслях промышленности.
Принцип действия
В статоре асинхронного двигателя укладывается трехфазная обмотка, которая при прохождении синусоидального тока создает вращающееся магнитное поле. При пересечении замкнутых проводников ротора магнитное поле создает электрический ток (возникает ЭДС).

Переменный ток в проводнике создает свое магнитное поле, которое стремится догнать поле статора. Взаимодействие полей заставляет вращаться ротор, скорость вращения которого отстает от скорости вращения поля статора на величину скольжения. Наличие этой разности главное условия вращения ротора асинхронного мотора.
Асинхронный трехфазный двигатель
Двигатели, использующие трехфазную электрическую сеть для создания статором вращающегося магнитного поля. По конструктивному исполнению ротора они делятся на короткозамкнутые и фазные.
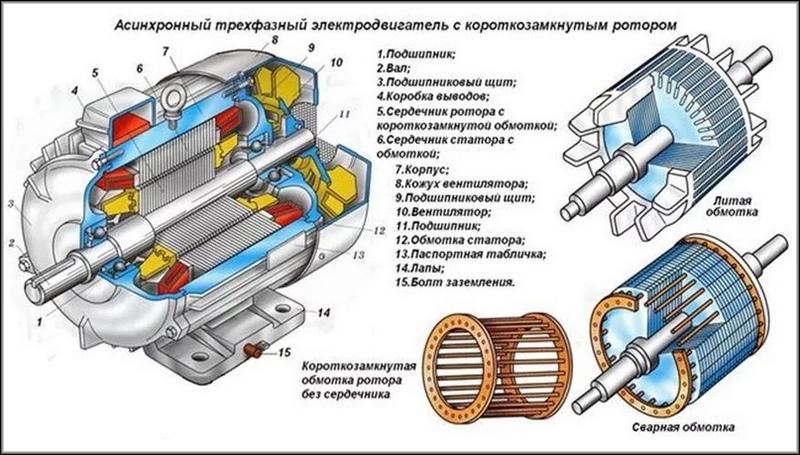
Для короткозамкнутого ротора — в пазы собранного из листов электротехнической стали цилиндра заливается алюминий (реже медь) и по торцам соединяются токопроводящими кольцами. В этой «беличьей» клетке образуется ЭДС, затем ток и магнитное поле для вращения вала. Последние конструкции таких двигателей используют цельно металлический полый алюминиевый ротор.

В фазных моторах трехфазная обмотка, соединенная «звездой», укладывается в пазы ротора и свободные концы выводятся на контактные кольца для подключения сети или резисторов для снижения пускового тока
Однофазный асинхронный мотор не может создать вращающееся магнитное поле, способное заставить ротор вращаться. Для того чтобы сдвинуть ротор, на статоре укладывается две обмотки: пусковая и рабочая. Во время пуска напряжение подается на рабочую и, на короткое время через конденсатор, на пусковую катушку. Созданный таким образом перекос фаз заставляет вращаться ротор, пусковая обмотка отключается, а двигатель входит в номинальный режим.
Синхронные двигатели переменного тока
У синхронных машин в номинальном режиме скорость вращения ротора равна скорости вращающегося поля статора. Отличающийся от асинхронного наличием коллектора.
На статоре такого электромотора размещается трехфазная обмотка (на больших машинах чаще всего высоковольтная), создающая вращающееся магнитное поле. На роторе укладывается две обмотки: «беличья клетка» и электромагнитные катушки с питанием от источника постоянного тока.

Пуск синхронного двигателя происходит, как и у асинхронного короткозамкнутого. По достижении номинальной скорости асинхронного режима подается питание на электромагниты, а скорости вращения магнитного поля статора и ротора уравниваются.
К положительным качествам синхронных машин можно отнести:
- небольшую реактивную мощность и. как следствие, высокий КПД и соs φ;
- в большом диапазоне постоянная скорость при переменной нагрузке;
- устойчивость к перегрузкам.
Из недостатков: наличие источника постоянного тока, сложность пуска, трудности в регулировании момента и скорости вращения.
Выбор электродвигателей
На описании принципов работы, устройства и краткого изложения характеристик однозначный выбор в пользу того или иного решения можно сделать только в самых простейших случаях. Современные электрические машины становятся все более универсальными. Какая разница есть между двигателем и генератором, в чем различие машин постоянного и переменного тока на первый взгляд не всегда возможно понять.
Развитие электронной промышленности размывает границы ниш. Теперь и двигатели постоянного тока, и двигатели переменного тока теряют свои позиции. Появление частотного регулирования скорости и момента асинхронных короткозамкнутых и синхронных двигателей все сильнее смещает принятие решения из инженерной сферы в технико-экономическую.
Электрические машины выбирают на основе следующих критериев:
- стоимость двигателя, силового преобразователя и программного обеспечения к нему;
- издержки на обслуживание и эксплуатационные расходы;
- надежное решение технологических задач в производстве;
- габаритные размеры и необходимую площадь.
Это только начало. В крупных проектах придется учитывать воздействие на окружающую среду, штрафы на искажение сетевой частоты и так далее. Чтобы принять оптимальное решение в конкретном случае — какой электродвигатель и с каким приводом применять — придется оценить совокупность множества условий.




